|
Wall Robot
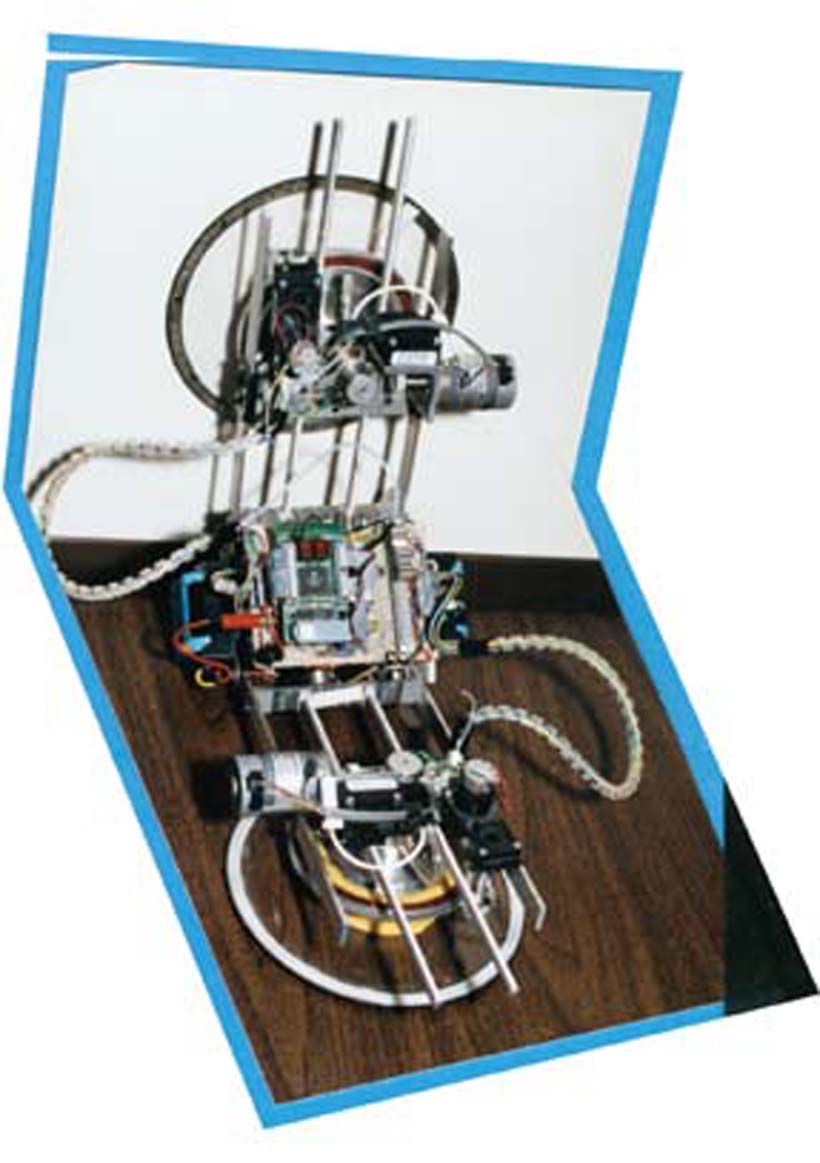
Premise: After 2 years at the MIT AI labs, Rod Brooks told me to "Think up a cool robot idea and build it." Yes, life was rough. No one at the lab had built a wall climber yet, and it seemed sufficiently cool. Approach: The impulse was to build something resembling a natural climber, but the actuator count, complexity and mass got out of control any way I looked at it. The trick was to forget about anatomy because animals don't have rotating parts. Result: Even with the 1989 battery mass penalty, this is the lightest wall climbing robot I have ever seen, self contained or otherwise. The design is simple but the capabilities lend themselves to many possibilities. By using 2 rotating suction feet and bending in the middle, it climbs by spinning around the planted foot, going from one foot to the next. With a 4th D.O.F. it can extend to reach for a surface normal to the one it's on- floor to wall, wall to wall, wall to ceiling. With sponge rubber sealed suction pads and diapraghm pumps it can adhere even to concrete as long as the batteries last.
|
|
|||||
| Normally the suction pads had a good deal of slop in them in the form of sealed, spring loaded chambers. Under vacuum this slop vanished onto tapered pins. This way, the robot could conform to a wall it was inaccurately reaching for, and have solid footing once the transfer was made. |
|
|||||