Launch Restraint Release for 2011 Mars Science Lab
--------NEW! This is my stuff on Mars! NEW!------
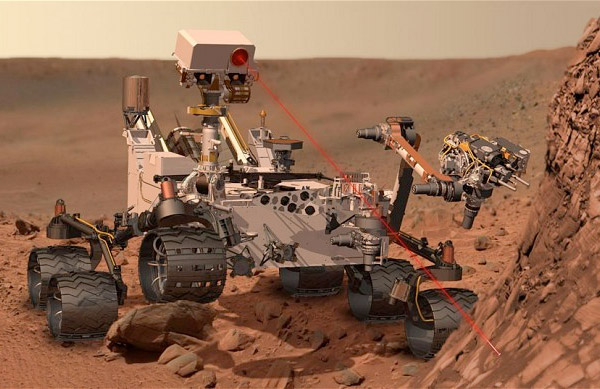
As the Mars Science Lab lands in 2011, all the moving components are going to be locked down to survive the rigors of launch, re-entry and landing. One of the last things to deploy on this rover is the robotic arm, designed and built as usual by Alliance Spacesystems, LLC. This one is huge compared to the pair from 2003, so the launch restraint system has to contain relatively high forces.
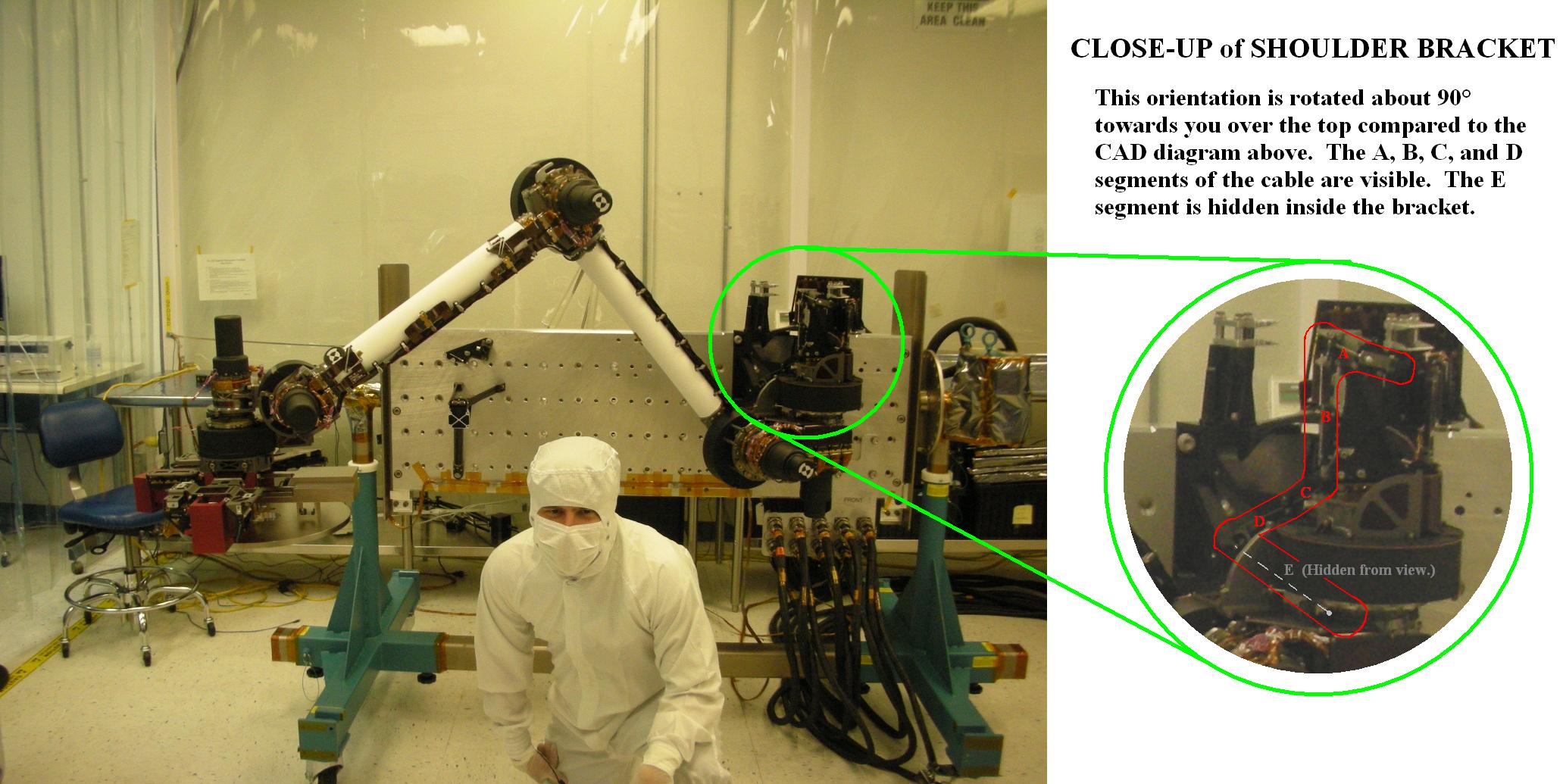
Before any exploration or sample taking happens, the arm has to be unlocked at the elbow and wrist. At the wrist, 2 pins held the business end in place. Those pins were energized with 180 pound springs and I had to design a way to let them go. The general idea was already assumed to be a single pyroelectric steel cable cutter with the steel cable running off "somehow" to each spring cartridge.
I blew the dust off one of my old class notebooks and used the capstan equation to show that these cables could be routed around hard anodized radiused corners and once the cable is cut, the springs could easily pull the cable through the system. This is intuitive, but a design decision like this has to be sold to the rest of the team using real numbers.
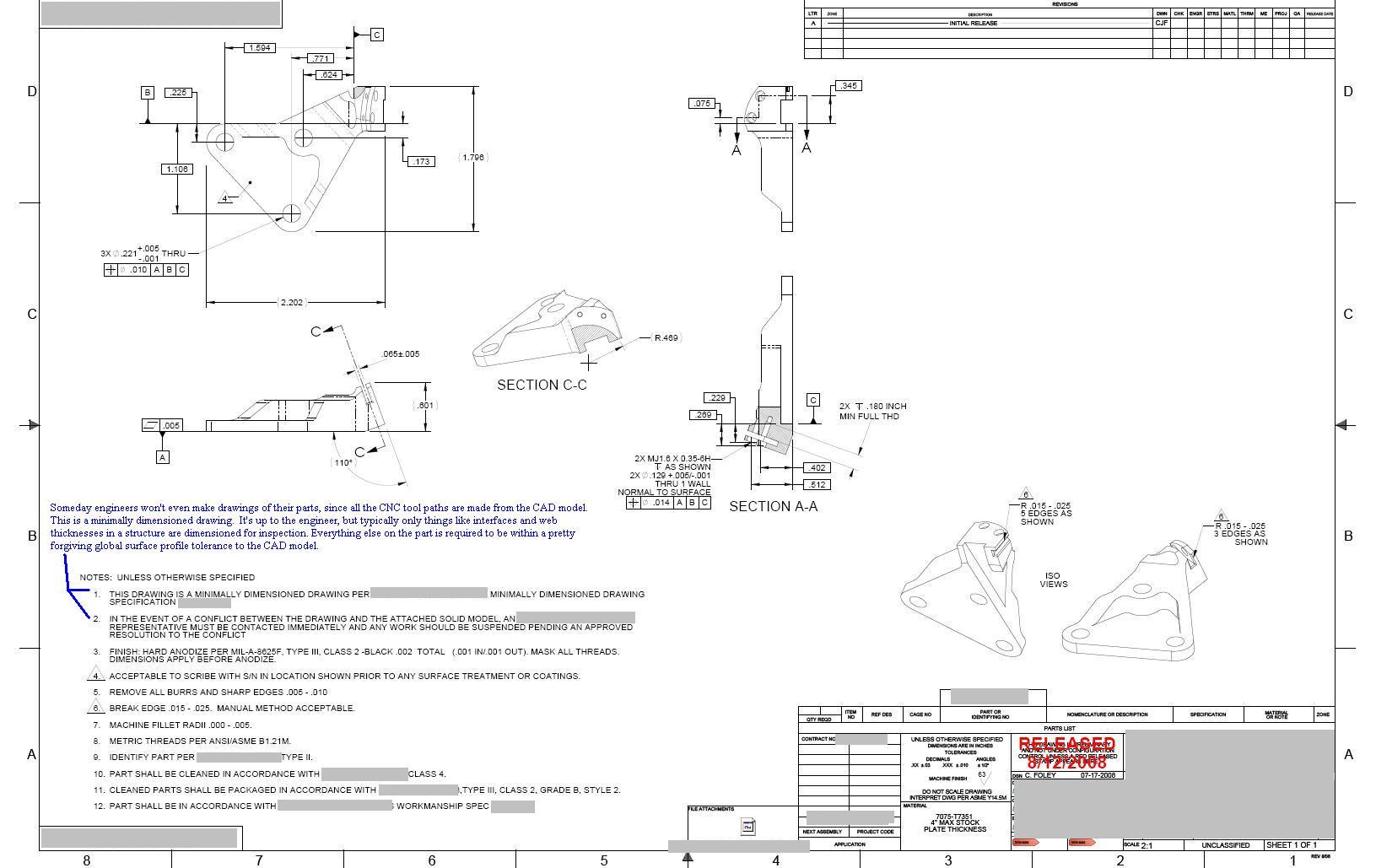
We were all working on the arm's shoulder assembly at the same time, calling over cubicle walls to ask for write access "For 10 minutes.... tops!" My design was one of the last things to be fleshed out. The wire rope cable had to snake all around the assembly, and every time it took a corner I designed a fairlead. Being last, my parts ended up looking pretty interesting in order to fit what was already there. I tried to keep it as easy as possible; for example the cable wants a 113.214° angle but 110° will do. This one has a lot of abnormal faces and edges but can be made in fewer setups than you'd think. Note the comments in blue. That's the future.
We were expected to do a bit of analysis on paper and in COSMOSworks just to get our designs close. A quick look at contact stresses or stress through a web thickness was OK but there were full time analysts on the project. They really dug into the problems, and our interaction with them was usually dealing with thread engagement lengths, bigger bolts, or torque specifications.
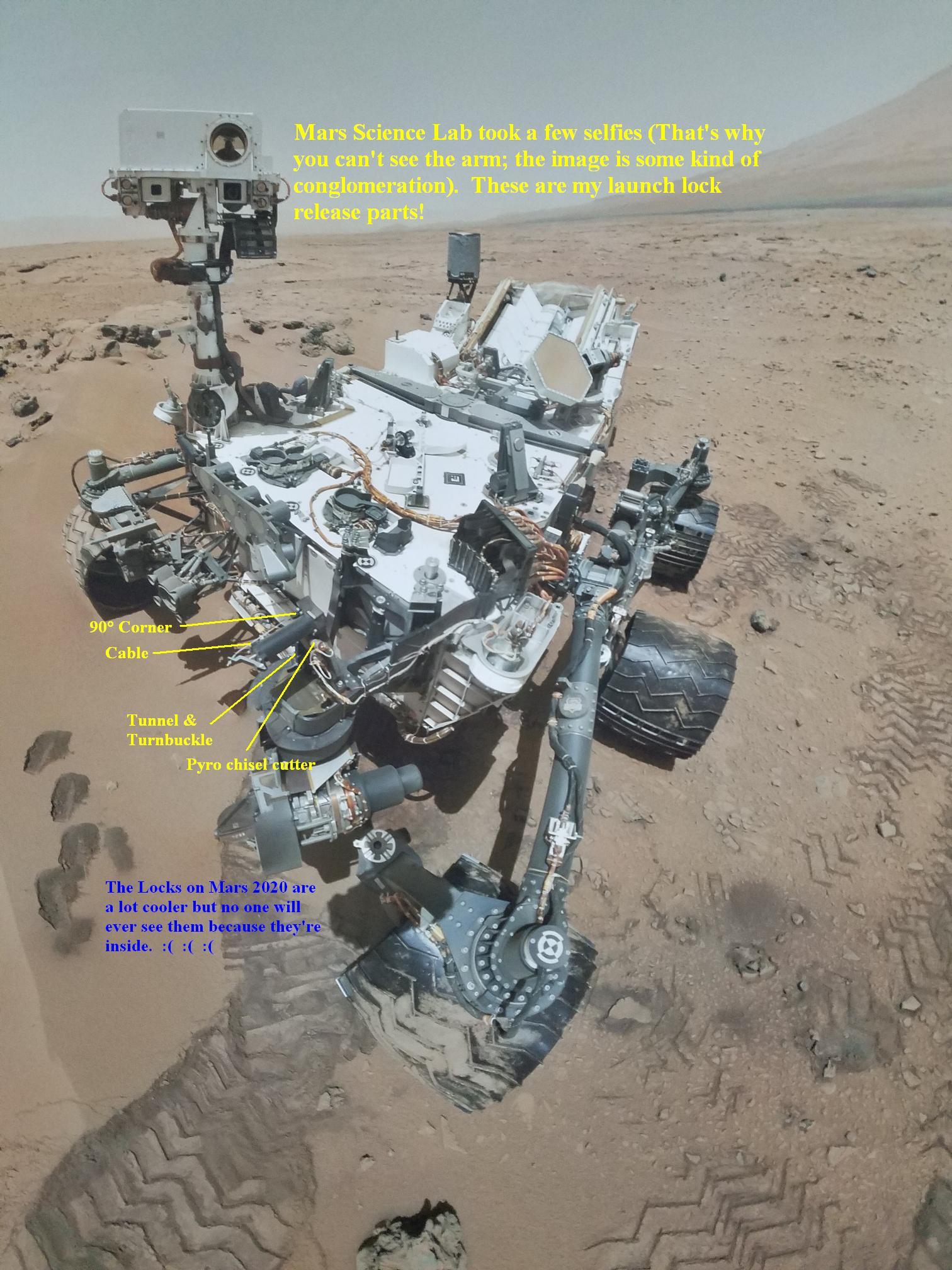
This mission was delayed so I have been waiting almost three years to find out if my design will work on Mars. The launch is on November 25th, 2011. I will eventually have pictures sent back from Mars of my parts.
|

{kind=link}